The goal is to methodically document your car in any way you think might be useful later on.
Examples of non-destructive testing
Dimensions: 6.5 X 5.5 X 4.5 in (L X W X H)
Weight: 460 grams
Time taken to charge: 8 hours for the first 2 times, 5-6 hours during normal use.
Range of speed: The way the maximum speed was calculated was by using the slowmo feature in the
phone (shown below). We put starting and finishing lines and determined the amount of time it takes
for the robot to travel that distance. At full battery life, the range of speed is: 0 m/s to
0.8636 m/s.
Motion of the robot
Picture of the setup
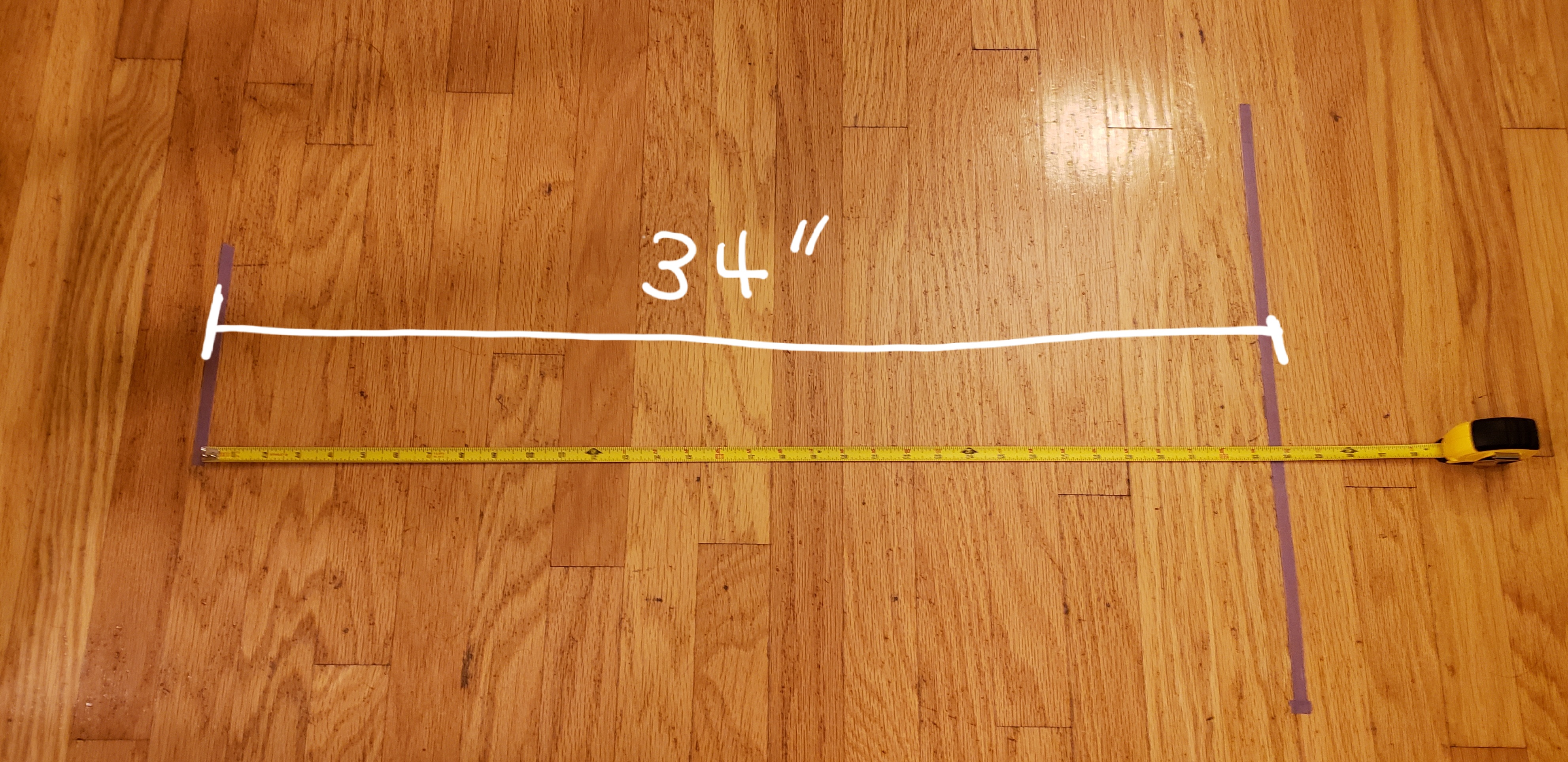
Braking distance:
Case 1: When the accelerator input is released, the rolling distance is ~81 inches
Case 2: When a reverse acceleration is applied at full speed, the braking distance: ~35
inches
The braking distance was calculated in these two cases by using a measuring tape from a predefined starting point to where the robot stopped.
Surface it can handle: Tile, Wood (Not carpet: Cannot spin about z-axis)
Stunts:
Land rolling state
Straight state in water
Rolling state in water
Robot turns around it own axis with no resistance on tile and wood, but on carpet it is unable
to oppose the friction between the tires and the carpet.
How well can I operate the car with manual control:
Starting from ~5m distance, at full speed, one can stop ~2.5 inches away from the wall,
without a crash.
Tricks:
Spindive 540:
Perpflip:
None of these can be done reliably, as it took a long time and effort to replicate these
tricks.
It is definitely not possible to manually control the robot and balance it on one set of wheels like an inverted pendulum.
Lab 3(b): Characterize your virtual robot
Objective
The goal is to familiarize myself with the simulator and the virtual robot.
Perform tests on the virtual robot
As shown below, the virtual robot works with the default linear and angular velocities:
Minimum Linear and Angular speed of the robot is close to zero, I noticed that there is no lower
bound to the minimum velocity, it is never really zero. However, It comes very close to zero, as shown
below:
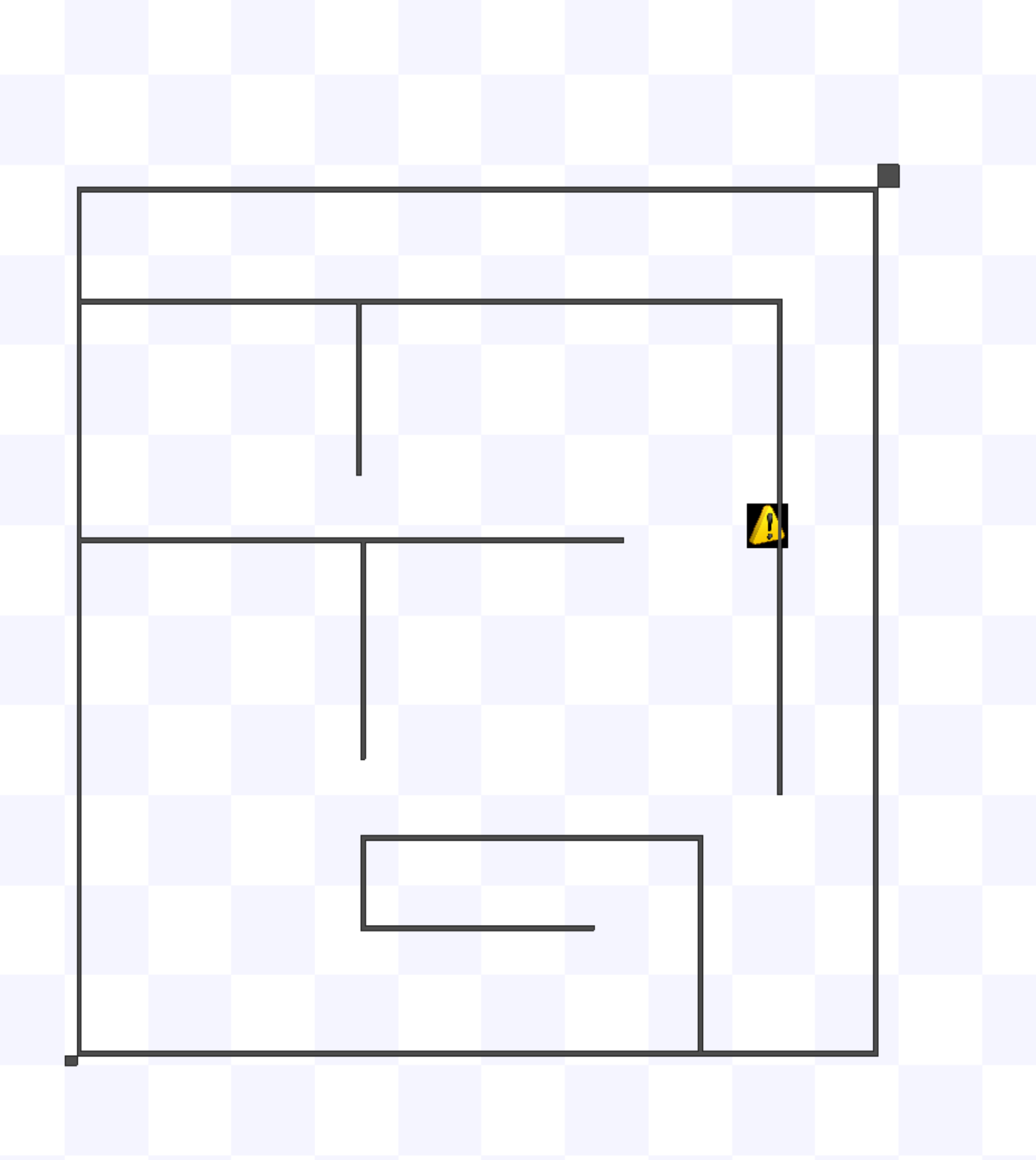
When the robot runs into an obstacle, it stops moving and the visual representation of the robot turns into an exclamation sign:
The robot can be picked up and moved during motion, and when the robot is placed back down it continues to move in the direction that it was moving before it was picked up: