Lab 11b: LQR on the Inverted Pendulum on a Cart
Objective
The purpose of this lab is to familiarize myself with linear controllers, LQR control and their cost functions..
Feedback control of an idealized pendulum on a cart system
Adapt the system parameters
I got the length and height of the robot from Lab 3 and updated the parameters on the virtual robot as shown below.
Open Loop
I ran the system open loop (without control) to confirm that the nonlinear dynamics are behaving as expected, and as shown below, the animation of the pendulum is what we expect. The pendulum itself is oscillating back and forth, while the cart that the pendulum is connected to moves in the opposite direction. Initially, the pendulum is vertically upwards, and slowly oscillates to rest due to the loss of momentum. Next steps are to compute the input to the cart such that the pendulum stay vertical.Add a Kr controller
I added a Kr controller in the format shown below. Intially, I had problems getting a stable system but I noticed a comment on campuswire regarding the (-) sign in the control law u = -kx, which means I was double counting the negative sign since the poles will be in the LHP (making it stable). After removing this sign the behavior of the pendulum was stable and the controller was behaving as expected. As shown below, I tried both aggressive and passive values and inspected their behavior.Format
dpoles = np.array([...Insert Poles here...])
Kr = control.place(P.A,P.B,dpoles)
x = des_state - curr_state
self.u = np.matmul(Kr,x)
Agressive
dpoles = np.array([-700,-2.5,-2,-3]) Passive
dpoles = np.array([-1,-2.5,-2,-3]) Compute and test LQR K-gains
Q tells me the status of the penalty if the desired z value is not the current z value, as in how quickly can I stabilize the system. Furthermore, Q is a matrix where each penalty value on the diagonal corresponds to each variable in the state space (z, zdot, theta, thetadot). In this case, I want the penalty to be higher for theta and thetadot since I want to stabilize to the vertical position quickly.R tells me the penalty on the control such that I do not spend too much energy in stabilizing the system. In this case, I want R to be small so it allows me to actuate the cart freely and aggressively.
Test 1:
Stable!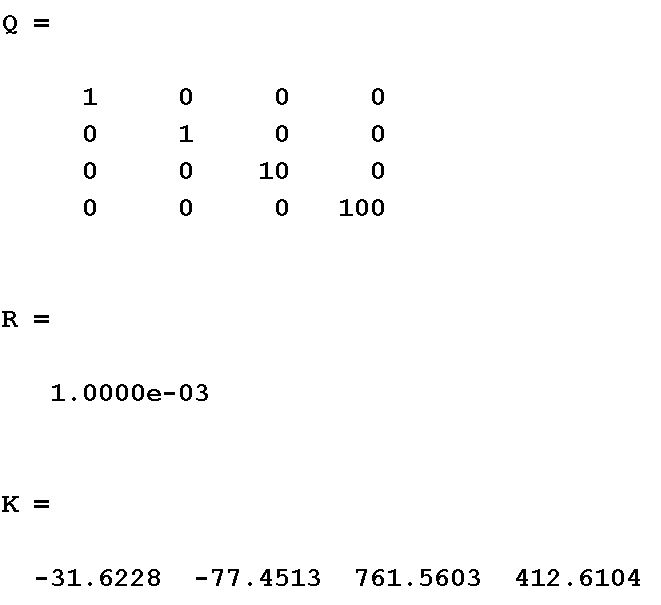
Test 2:
Stable!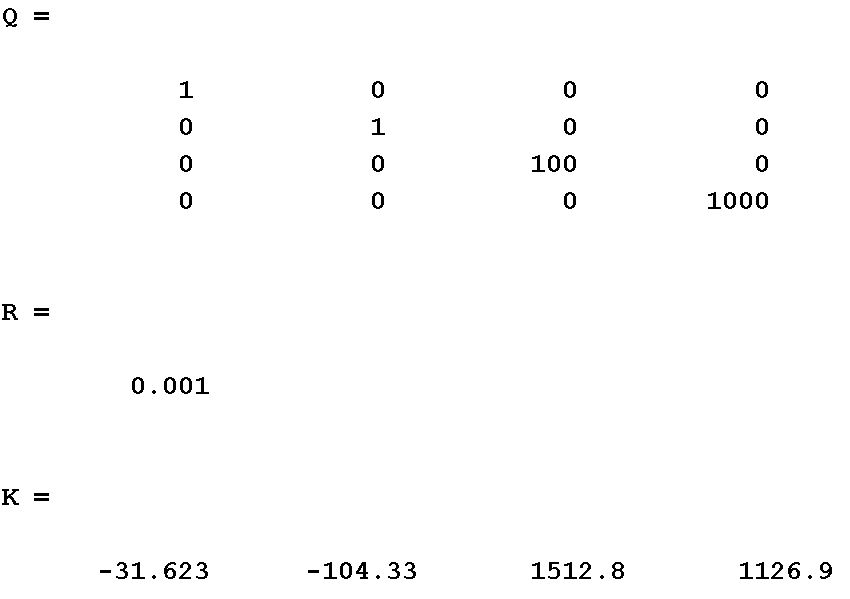
Test 3:
Unstable!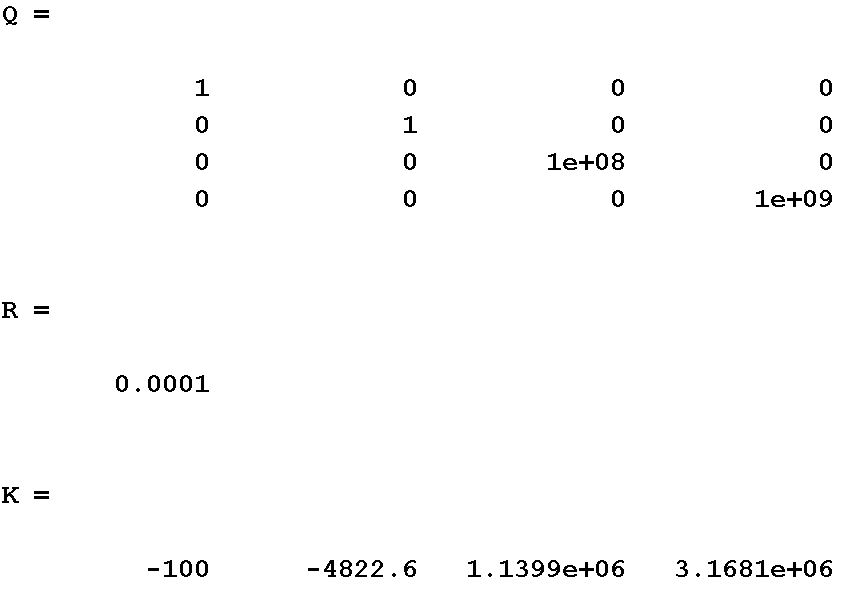
The real actuators and sensors on the robot are not reliable enough, therefore, Q and R would be higher as to penalize the theta and thetadot values of the pendulum, so the system stabilizes quicker. However, the motors are not reliable to perform a quick precise motion, therefore, the penalties cannot be so high such that it will be impossible for the robot to meet the speed and accuracy at the same time (this will only affect the system by dropping the pendulum). Therefore, I would pick test 2.
I computed the K values in MATLAB with the code shown below, and transfered them to python for animation:
A = [0.0, 1.0, 0.0, 0.0;
0.0, -b/m2, -m1*g/m2, 0.0;
0.0, 0.0, 0.0, 1.0;
0.0, -b/(m2*ell), -(m1+m2)*g/(m2*ell), 0.0];
B = [0.0;
1.0/m2;
0.0;
1.0/(m2*ell)];
C = [1.0, 0.0, 0.0, 0.0;
0.0, 1.0, 0.0, 0.0;
0.0, 0.0, 1.0, 0.0;
0.0, 0.0, 0.0, 1.0];
Q = [1,0,0,0;
0,1,0,0;
0,0,100000000,0;
0,0,0,1000000000]
R = 0.0001
K = lqr(A,B,Q,R)
Feedback control of a non-ideal pendulum on a cart system
In order to account for the limits of the robot on the minimum (deadband) and maximum (saturation) velocities, I added a conditional statement in the code that would check if zdot is within a certain range. I used the same R and Q from test 2 above. I checked if the value of zdot was negative or not, and stored it so that I could compare the absolute values with the bounds and then multiply zdot by the sign after conducting this check. In the conditional statements, I checked if the value was too low or too high, and set it to minimum velocity or maximum velocity, respectively. The result of this change is shown in the video below, where the system is still stable.
Kr = np.array([-31.623 , -104.33 , 1512.8 , 1126.9]) # From Q and R
x = des_state - curr_state
self.u = np.matmul(Kr,x)
# Bounds
maxV = 0.8636 # @255
minV = 0 # @~75
# Check if zdot is negative or positive
sign = 1 # If (+)
if (zdot < 0):
sign = -1 # If (-)
# Check if zdot is outsides bounds
zdot = abs(zdot)
if (zdot < minV or zdot > maxV):
if (zdot < minV): # Check if less than deadband
zdot = minV
elif (zdot > maxV): # Check if greater than saturation
zdot = maxV
zdot = sign*zdot